Teleneurosurgery
First - Omni Brain has moved to ScienceBlogs.com, part of the Seed Media Group responsible for many interesting projects (see Phylotaxis). Steve and I will continue to post brain silliness, for lots more readers. My blog attention has been focussed on the move of late, but Neurofuture remains a priority. Onward into the future!
Neurosurgery has long incorporated robotics, technology allowing far more precision. Computer assisted surgery (CAS) has been around for a while in various configurations, including telementoring in which a remote robot is controlled by neurosurgeons while closely monitored by a distant expert surgeon. A team in Saint Johns, New Brunswick and Halifax were the world's first to perform neurosurgery by telesurgery, in 2002, using the SOCRATES telementoring system (published here).
No CAS telesurgery system gave direct control of the surgery to one remote surgeon via the robot, however. That's now changed with another Canadian innovation, the NeuroArm from the University of Calgary and MD Robotics. (Canada has developed a number of telemedicine applications, being a large country with a far-flung population, and expertise in space robotics.) The NeuroArm has a haptic interface, integrates with near-realtime MR neuroimaging, and provides "all the features that a neurosurgeon would need to directly manipulate [surgery]." It's been in development for years and now going into manufacturing.
Just don't confuse it with the other NeuroArm, tempting as it may seem to build your own NeuroArm from a kit.
Read more about robotic neurosurgery and telesurgery.
Read more about medical robotics and CAS.

Neurosurgery has long incorporated robotics, technology allowing far more precision. Computer assisted surgery (CAS) has been around for a while in various configurations, including telementoring in which a remote robot is controlled by neurosurgeons while closely monitored by a distant expert surgeon. A team in Saint Johns, New Brunswick and Halifax were the world's first to perform neurosurgery by telesurgery, in 2002, using the SOCRATES telementoring system (published here).
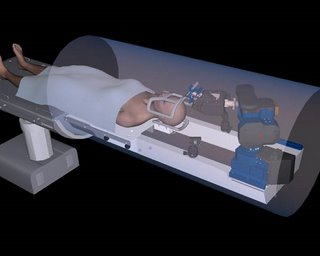
No CAS telesurgery system gave direct control of the surgery to one remote surgeon via the robot, however. That's now changed with another Canadian innovation, the NeuroArm from the University of Calgary and MD Robotics. (Canada has developed a number of telemedicine applications, being a large country with a far-flung population, and expertise in space robotics.) The NeuroArm has a haptic interface, integrates with near-realtime MR neuroimaging, and provides "all the features that a neurosurgeon would need to directly manipulate [surgery]." It's been in development for years and now going into manufacturing.
Designed based on biomimicry, the controller’s hand movements (master) are replicated by robotic arms (slave) which hold surgical tools. The NeuroArm comprises 2 arms, each with 7 degrees of freedom, and a third arm with 2 cameras which provides the surgeon with a 3-D stereoscopic view7. NeuroArm is able to carry out microsurgical techniques and soft tissue manipulations such as biopsy, microdissection, thermocoagulation, blunt dissection, grasping of tissue, cauterizing, manipulation of a retractor, tool cleaning, fine suturing, suction, microscissors, needle drivers, and bipolar forceps. All the tools are exchanged at the end-effector, which also provides haptic force feedback to the surgeon.
...In an attempt to replicate the surgical arena, the workstation provides the surgeon with 3 areas of feedback: sound, sight, and touch4. The surgical microscope (binoculars) give stereoscopic views of the brain’s complex folds, while MRIs and robotic sensors create a 3-dimensional map of the brain for the surgeon on the displays. The microsurgical tools and real-time MRIs increase the accuracy of the surgeon 1000-folds (from an accuracy level of 1 millimeter to one-thousandth of a millimeter)...The NeuroArm’s image guidance system is so advanced that the surgeon can simulate the procedure in virtual reality beforehand.
Just don't confuse it with the other NeuroArm, tempting as it may seem to build your own NeuroArm from a kit.
Read more about robotic neurosurgery and telesurgery.
Read more about medical robotics and CAS.
posted by Sandra at 18:48
![]()
![]()





0 Comments:
Post a Comment
<< Home